§4 空间中的直线与平面
一、 直线的方向
|
名 称 与 说 明 |
图 形 |
|
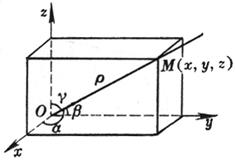
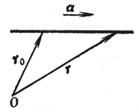
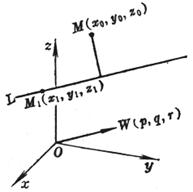
[方向角] 通过原点O的直线OM与三条坐标轴的夹角a, b, g 称为该直线的方向角(OM的方向为离开原点O的方向): [方向余弦] 直线的方向角的余弦称为方向余弦: 式中 |
|
|
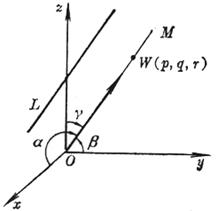
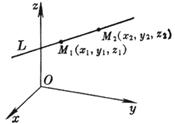
[方向数] 通过原点且平行于直线L的直线OM上任意一点W的坐标(p, q, r)称为直线L的方向数,而
|
|
|
名 称 与 说 明 |
图 形 |
|
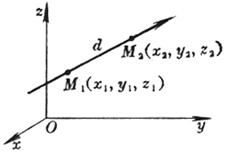
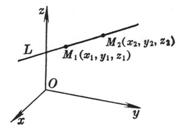
[过两点的直线的方向余弦]
式中 这时直线的正向为M1(x1, y1, z1)到M2(x2, y2, z2)的方向.
|
|
二、 平面的方程
|
方 程 与 图 形 |
说 明 |
|||||
|
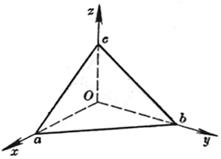
[截距式] |
|
a, b, c分别称为平面在三条坐标轴上的截距
|
||||
|
[点法式]
(A, B, C不同时等于零)
|
|
平面通过点M(x0, y0, z0),且法线N的方向数为A, B, C
|
||||
|
[三点式] |
|
平面通过三点: M1(x1, y1, z1) M2(x2, y2, z2) M3(x3, y3, z3)
|
||||
|
或
|
||||||
|
方 程 |
与 图 形 |
说 明 |
||||
|
[一般式] Ax + By + Cz + D = 0 (A, B, C为该平面的法线的方向数,且不同时等于零) |
|
当D=0时,平面通过原点 当A=0时(或B=0,或C=0)时,平面与x轴(或y轴,或z轴)平行 当A=B=0时(或A=C=0,或B=C=0)时,平面与Oxy平面(或Ozx,或Oyz)平行 |
||||
|
[法线式]
(a, b, g为平面的法线的方向角,p³0为法线长即原点到平面的距离)
|
|
平面的一般式可化为法线式
|
||||
|
[矢量式] (r -r0)× a = 0
|
|
平面 通过矢径r0的终点,且与已知矢量a垂直,r为平面上任意一点的矢径
|
||||




三、 直线的方程
|
方 程 与 图 形 |
说 明 |
||
|
[一般式(或交面式)] L
|
把直线L作为两个平面的交线,它的方向数为
|
||
|
[对称式(或参数式)]
或 |
直线L通过点M(x0, y0, z0),且具有方向数p, q, r
|
||
|
方 程 与 图 形 |
说 明 |
||
|
[两点式]
|
直线L通过M1(x1, y1, z1)和M2(x2, y2, z2)两点
|
||
|
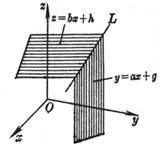
[射影式] L |
|
直线L是y = ax+ g 和z = bx + h两个平面的交线;通过点(0, g, h)且具有方向数1, a, b
|
|
|
[矢量式] r = r0 + ta (-¥< t < ¥)
|
|
直线L通过矢径r0的终点,且与已知矢量a平行,r为L上任意一点的矢径
|
|





四、 空间中点、直线、平面的相互关系
|
方 程 与 图 形 |
公 式 与 说 明 |
|
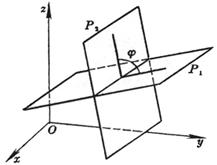
[二平面的夹角] P1 A1x + B1y + C1z + D1 = 0 P2 A2x + B2y + C2z + D2 = 0
|
式中
|
|
方 程 与 图 形 |
公 式 与 说 明 |
|
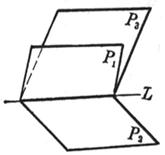
[平面束×三平面共线的条件] Pl (A1x+ B1y + C1z + D1) + l (A2x + B2y + C2z + D2) = 0 (l为参数,-¥<l< ¥)
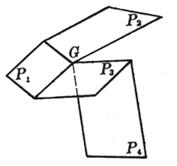
[平面把×四平面共点的条件] Plm (A1x + B1y + C1z + D1) + l (A2x + B2y + C2z + D2) + m (A3x + B3y + C3z + D3) = 0 (l, m为两个独立参数, - ¥ < l , m < ¥) |
对l的一个确定值,Pl表示一个通过二平面P1和P2交 线L的平面,当l取一切值时,Pl所表示的通过L的平面的全体称为平面束,L称为束的轴. 设P3为A3x + B3y + C3z + D3 = 0,则三个平面P1, P2, P3共线的条件为矩阵
的秩等于2.
对l,m的一对确定值,Plm表示通过三平面P1, P2和P3交点G的一个平面,当l, m取一切值时,Plm 所表示的通过G的平面的全体称为平面把,G称为把的顶点. 设P4为A4x + B4y + C4z + D4 = 0,则四个平面P1, P2, P3, P4共点的条件为行列式
|
|
[点面的距离] 法线式 xcosa + ycosb + zcosg - p = 0 一般式 Ax + By + Cz + D = 0
|
d法 = | x0cosa + y0cosb + z0cosg - p | 式中d为点M(x0,y0,z0)到平面的距离
|
|
方 程 与 图 形 |
公 式 与 说 明 |
|
[点线的距离] L
|
式中d为点M(x0, y0, z0)到直线L的距离,i,j,k为三个坐标轴上的单位矢量,最外面的符号“| |”表示矢量的模
|
|
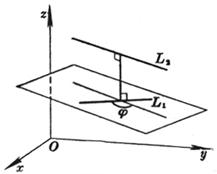
[二直线的夹角] L1 L2
|
式中j为二直线L1和L2的夹角
|
|
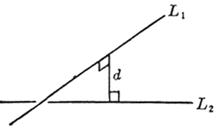
[二不平行直线的最短距离] L1 L2
|
所谓最短距离是指L1, L2的公共垂线与此两线交点之间的距离,式中正负号与行列式取同号.从此推出二直线共面的条件为d=0,所在平面的方程为
|
|
|
|
|
方 程 与 图 形 |
公 式 与 说 明 |
|
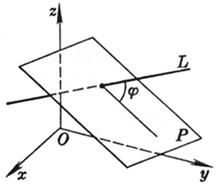
[直线与平面的夹角] L P Ax + By + Cz + D = 0
|
式中j为直线L与平面P的夹角
|



[直线与平面的平行与垂直条件]
|
平 行 条 件 |
垂 直 条 件 |
|
线与线 面与面 线与面
|
p1p2 + q1q2 + r1r2 = 0
A1A2 + B1B2 + C1C2 = 0
|