§2 基本单元与线性插值
一、
基本单元与型函数
基本单元就是指边界平直的子区域,仅取其顶点作节点,并且只用待定函数值作为节点参数值。常用的几何形状是
一维的直线段(二节点)。
二维的三边形(三节点),四边形(四节点)。
三维的四面体(四节点),六面体(八节点)。
在这类单元上,插值函数是线性、双线性或三线性的多项式,即对各个坐标变量x,y或z来说都是一次的。
为明确起见,本节以P表示坐标为![]() 的变点,而以Pi表示节点。设单元有p个节点,其局部序号为
的变点,而以Pi表示节点。设单元有p个节点,其局部序号为![]() ,局部坐标为
,局部坐标为![]()
![]() ,而相应的整体直角坐标取作
,而相应的整体直角坐标取作![]()
![]() 。这些坐标系都取右手系。
。这些坐标系都取右手系。
如果在基本单元内同样有p个多项式![]() 满足条件:
满足条件:
(i)
p个多项式![]() 之和恒等于1,即
之和恒等于1,即
![]() (8)
(8)
(ii)
任一![]() 在节点
在节点![]() 取值1,在其余p-1个节点取值0,即
取值1,在其余p-1个节点取值0,即
![]()
![]() (9)
(9)
则称![]() 为该单元的型函数。
为该单元的型函数。![]() 可以写成
可以写成![]() 或
或![]() 的函数。
的函数。
基本单元的型函数存在而且是线性(包括双线性、三线性)的。因此对于线性的插值函数![]() ,包括
,包括![]() (看作坐标本身的线性函数)可表示为
(看作坐标本身的线性函数)可表示为
![]()
![]() (10)
(10)
![]()
![]() (11)
(11)
二、
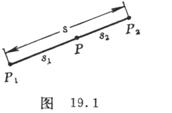 直线段单元
直线段单元
[距离坐标] 设直线段二端点为![]() ,则线段上任一点P的距离坐标
,则线段上任一点P的距离坐标![]() 定义为
定义为
![]()
显然端点![]() 的距离坐标
的距离坐标![]() 分别为(1,0),(0,1),且有
分别为(1,0),(0,1),且有
![]()
[型函数] 距离坐标![]() (i=1,2)本身可取作型函数
(i=1,2)本身可取作型函数![]() 。它们与直角坐标之间的关系依(11)为
。它们与直角坐标之间的关系依(11)为
![]()
![]()
[坐标变换] 由于P在直线段![]() 上,所以坐标变量只有一个独立,假定取x;同样其距离坐标也只有一个独立,假定取
上,所以坐标变量只有一个独立,假定取x;同样其距离坐标也只有一个独立,假定取![]() 。从上二式得
。从上二式得
![]()
[线性插值函数]
![]()
![]()
三、
三边形单元
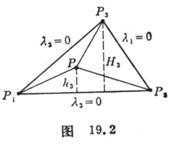 [面积坐标] 设三边形的顶点为
[面积坐标] 设三边形的顶点为![]() ,则三边形的任一点P的面积坐标
,则三边形的任一点P的面积坐标![]() 定义为
定义为
![]() (i=1,2,3)
(i=1,2,3)
式中![]() 表示P与
表示P与![]() 的对边
的对边![]() 构成的
构成的![]() 的面积,A为
的面积,A为![]() 的面积,而
的面积,而![]() 分别表示P,
分别表示P,![]() 到
到![]() 的距离。显然
的距离。显然![]() 的面积坐标分别为(1,0,0),(0,1,0),(0,0,1),且有
的面积坐标分别为(1,0,0),(0,1,0),(0,0,1),且有
![]()
[型函数] ![]() 就是面积坐标
就是面积坐标![]() ,它们与直角坐标之间的线性关系式为
,它们与直角坐标之间的线性关系式为
![]()
![]()
[坐标变换及其雅可比式]
由于P在![]() 平面上,所以只有两个坐标变量独立,假定取x,y;同样,面积坐标只有两个独立,假定取
平面上,所以只有两个坐标变量独立,假定取x,y;同样,面积坐标只有两个独立,假定取![]() 。从上二式可得
。从上二式可得
式中![]() ,
,
其绝对值等于单元面积A即![]() 。
。
雅可比式(即变换矩阵的行列式)为
逆变换矩阵为
[线性插值函数]
![]()
![]()
利用![]() 的循环性,以x,y为变量的型函数可写成
的循环性,以x,y为变量的型函数可写成
四、
四边形单元
 [双向距离坐标] 从四边形一顶点
[双向距离坐标] 从四边形一顶点![]() 开始各在二邻边
开始各在二邻边![]() 定义距离坐标;然后再在其对边沿同方向即
定义距离坐标;然后再在其对边沿同方向即![]() 同样定义距离坐标。把
同样定义距离坐标。把![]() ,以及
,以及![]() 具相同的距离坐标的变点联成直线段,构成一个局部坐标网。于是四边形的任意一点P是坐标网的一个结点,其局部坐标(ξ,η)可分别取
具相同的距离坐标的变点联成直线段,构成一个局部坐标网。于是四边形的任意一点P是坐标网的一个结点,其局部坐标(ξ,η)可分别取![]() ,
,![]() 二线段的第二距离坐标(即
二线段的第二距离坐标(即![]() )。这样,直角坐标系中的四边形
)。这样,直角坐标系中的四边形![]() 与局部坐标系中的单元正方形(0≤ξ≤1,0≤η≤1)之间就建立一一对应(图19.3)。
与局部坐标系中的单元正方形(0≤ξ≤1,0≤η≤1)之间就建立一一对应(图19.3)。
[型函数]
对于单位正方形的![]() 显然可取
显然可取![]()
![]() ,
,![]() ,
,![]() 它是双线性的,即对ξ或η都是线性的。由于顶点
它是双线性的,即对ξ或η都是线性的。由于顶点![]() 的局部坐标
的局部坐标![]() 取值为1或0,型函数还可以统一写成
取值为1或0,型函数还可以统一写成
![]() (i=1,2,3,4)
(i=1,2,3,4)
[坐标变换及其雅可比式]
![]()
![]()
雅可比式(即变换矩阵的行列式)为
逆变换矩阵为
它的元素是ξ,η的分式线性函数。
[双线性插值函数]
![]()
![]()
五、
四面体单元
[体积坐标]
设四面体顶点为![]() (i=1,2,3,4),则四面体的任一点P的体积坐标
(i=1,2,3,4),则四面体的任一点P的体积坐标![]() 定义为
定义为

![]() (i=1,2,3,4)
(i=1,2,3,4)
式中![]() 表示P与
表示P与![]() 所对的底面三角形构成四面体的体积,V为四面体单元的体积,而
所对的底面三角形构成四面体的体积,V为四面体单元的体积,而![]() 分别表示P,
分别表示P,![]() 到底面的距离。显然,
到底面的距离。显然,![]() 的体积坐标除
的体积坐标除![]() 外,其余
外,其余![]() 且有
且有
![]() (12)
(12)
[型函数] ![]() 就是体积坐标
就是体积坐标![]() (i=1,2,3,4),它们与直角坐标之间的线性关系式为
(i=1,2,3,4),它们与直角坐标之间的线性关系式为
![]()
![]() (13)
(13)
[坐标变换及其雅可比式]
假定![]() 为独立变量,则由上(12),(13)得
为独立变量,则由上(12),(13)得
式中
 ,
, ,
,
![]()
其绝对值等于单元体积V即![]() 。
。
雅可比式(即变换矩阵的行列式)为
逆变换矩阵为
[线性插值函数]
![]()
![]()
由(12),(13)可直接求得
等式右端系数矩阵各元素可循环定义如下:
实际上不难看出![]() ,
,![]() ,…,只不过这里用三阶行列式代替Xi4等二阶行列式,便于循环定义,结果还是一致的。
,…,只不过这里用三阶行列式代替Xi4等二阶行列式,便于循环定义,结果还是一致的。
六、
六面体单元
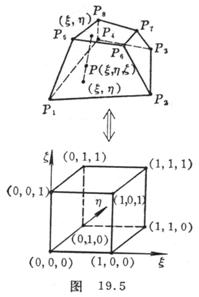
[三向距离坐标] 设六面体的顶点为![]() (i=1,2,…,8)(图19.5)。利用双向距离坐标,先把四边形
(i=1,2,…,8)(图19.5)。利用双向距离坐标,先把四边形![]() 变换到局部坐标系(ξ,η,ζ)的坐标面ζ=0上的单位正方形(0≤ξ≤1,0≤η≤1);再在
变换到局部坐标系(ξ,η,ζ)的坐标面ζ=0上的单位正方形(0≤ξ≤1,0≤η≤1);再在![]() 线段上定义距离坐标,并取作(1-ζ,ζ),
线段上定义距离坐标,并取作(1-ζ,ζ), ![]() 的ζ分别为0与1。现在又对四边形
的ζ分别为0与1。现在又对四边形![]() 利用双向距离坐标,把它变换到坐标面ζ=1上的单位正方形(0≤ξ≤1,0≤η≤1)。这就在四边形
利用双向距离坐标,把它变换到坐标面ζ=1上的单位正方形(0≤ξ≤1,0≤η≤1)。这就在四边形![]() 与
与![]() 分别同ζ=0与ζ=1上的单位正方形各点间建立一一对应。最后把上下四边形具同样局部坐标(ξ,η)的点联成线段,并沿
分别同ζ=0与ζ=1上的单位正方形各点间建立一一对应。最后把上下四边形具同样局部坐标(ξ,η)的点联成线段,并沿![]() 方向(由下而上)定义距离坐标(1-ζ,ζ)。于是该线段上任意一点P的局部坐标可取为(ξ,η,ζ)。这样,直角坐标系中的任意六面体单元与局部坐标系中的单位立方体(0≤ξ≤1,0≤η≤1,0≤ζ≤1)之间就建立了一一对应。
方向(由下而上)定义距离坐标(1-ζ,ζ)。于是该线段上任意一点P的局部坐标可取为(ξ,η,ζ)。这样,直角坐标系中的任意六面体单元与局部坐标系中的单位立方体(0≤ξ≤1,0≤η≤1,0≤ζ≤1)之间就建立了一一对应。
[型函数] 对于单位立方体,利用节点的对称性得出型函数为
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
由于顶点![]() 的局部坐标
的局部坐标![]() 取值为1或0,
取值为1或0,![]() 可统一写成
可统一写成
![]() (i=1,2,…,8)
(i=1,2,…,8)
它是三线性的,即对ξ或η或ζ都是线性的。
[坐标变换及其雅可比式]
![]()
![]()
同![]() 一样,它是三线性的。这表明六面体的棱边应是直线段。
一样,它是三线性的。这表明六面体的棱边应是直线段。
雅可比式(即变换矩阵的行列式)为
式中
![]()
![]()
![]()
变换矩阵也可写成
从上式看出变换矩阵各行关于ξ,η,ζ的二次项系数是相同的,记
![]()
![]()
![]()
![]()
对![]() 也有相应的记号
也有相应的记号![]() ,则变换矩阵可写成
,则变换矩阵可写成

其行列式是ξ,η,ζ的四次多项式,而且![]() 各项的系数为零。
各项的系数为零。
[三线性插值函数]
![]()
七、
三棱柱单元
 [局部坐标] 上、下底三角形可利用面积坐标,而沿高度方向则利用距离坐标来构成局部坐标。设ξ,η取其第二、三面积坐标,ζ取第二距离坐标,于是直角坐标系中的三棱柱与局部坐标系中的单位三棱柱(上下底是腰为1的等腰直角三角形,高为1,见图19.6)之间建立一一对应。
[局部坐标] 上、下底三角形可利用面积坐标,而沿高度方向则利用距离坐标来构成局部坐标。设ξ,η取其第二、三面积坐标,ζ取第二距离坐标,于是直角坐标系中的三棱柱与局部坐标系中的单位三棱柱(上下底是腰为1的等腰直角三角形,高为1,见图19.6)之间建立一一对应。
[型函数]
![]()
![]()
![]()
![]()
![]()
![]()
由于顶点![]() 的局部坐标
的局部坐标![]() 取值为1或0,
取值为1或0,![]() 可统一写成
可统一写成
![]()
(i=1,2,…,6)
[坐标变换及其雅可比式]
|
|

变换矩阵为
雅可比式为

式中
![]()
其余的![]() 可类似定义。
可类似定义。
八、
基本单元的特点
综合上述,可知基本单元具有以下特点:
1° 基本单元形态简洁,因而得到广泛的应用。坐标变换与插值的表达式都是线性(包括双线性、三线性)的,并具有同样的模式。两个相邻的基本单元在公共边界上是相容的,即保持连续性。
2° 在单元分析中通常是把对(x,y,z)所作的微分与积分运算改用局部坐标来进行,这就需要用到变换矩阵及雅可比式J。除六面体单元外,其表达式比较简单。如果六面体的形状单纯,例如常用一系列平行于直角坐标的正六面体为单元,则其坐标变换退化为线性的,变换矩阵也很简单。
3° 在选取单元的形状时,为了减少插值误差,三边形或四面体单元不能取得太尖或太扁;四边形或六面体单元应当取凸的,而且不能太尖或太扁。
4° 基本单元的局部坐标系是通过内在的度量比坐标来构成的,与直角坐标系之间的对应关系是借助型函数直接表示出来。由于在局部坐标系中单元是规则的,型函数容易构成,因此这种方法不但对基本单元行之有效,还可以推广到其他类型的单元(参看后两节)。