§4 偏微分方程的数值解法
一、 差分法
差分法是常用的一种数值解法.它是在微分方程中用差商代替偏导数,得到相应的差分方程,通过解差分方程得到微分方程解的近似值.
1. 网格与差商
|
图14.7 |
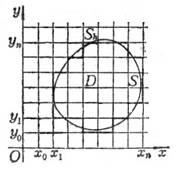
在平面 (x,y)上的一以S为边界的有界区域D上考虑定解问题.为了用差分法求解,分别作平行于x轴和y轴的直线族.
 (i,j=0,1,2,…,n)
(i,j=0,1,2,…,n)
作成一个正方形网格,这里h为事先指定的正数,称为步长;网格的交点称为节点,简记为(i,j).取一些与边界S接近的网格节点,用它们连成折线Sh,Sh所围成的区域记作Dh.称Dh内的节点为内节点,位于Sh上的节点称为边界节点(图14.7).下面都在网格Dh + Sh上考虑问题:寻求各个节点上解的近似值.在边界节点上取与它最接近的边界点上的边值作为解的近似值,而在内节点上,用以下的差商代替偏导数:
注意, 1° 式中的差商![]() 称为向后差商,而
称为向后差商,而![]() 称为向前差商,
称为向前差商,![]() 称为中心差商.也可用向前差商或中心差商代替一阶偏导数.
称为中心差商.也可用向前差商或中心差商代替一阶偏导数.
2° x轴与y轴也可分别采用不同的步长h,l,即用直线族
 (i,j=0, ±1, ±2
(i,j=0, ±1, ±2![]() )
)
作一个矩形网格.
2. 椭圆型方程的差分方法
[五点格式] 考虑拉普拉斯方程的第一边值问题
式中(x,y)为定义在D的边界S上的已知函数.
采用正方形网格,记u(xi,yj)=uij ,在节点(i,j)上分别用差商
![]()
代替![]() ,对应的差分方程为
,对应的差分方程为
![]() (1)
(1)
或
![]()
即任一节点(i,j)上uij的值等于周围相邻节点上解的值的算术平均,这种形式的差分方程称为五点格式,在边界节点上取
![]() (2)
(2)
式中(xi*,yj*)是与节点(i,j)最接近的S上的点.于是得到了以所有内节点上的uij值为未知量的若干个线性代数方程,由于每一个节点都可列出一个方程,所以未知量的个数与方程的个数都等于节点的总数,于是,可用通常的方法(如高斯消去法)解此线性代数方程组,但当步长不很大时,用高斯消去法将会遇到很大困难,可用下面介绍的其他方法求解.
若h0时,差分方程的解收敛于微分方程的解,则称差分方程为收敛的.
在计算过程中,由于进行四则运算引起舍入误差,每一步计算的舍入误差都会影响以后的计算结果,如果这种影响所产生的计算偏差可以控制,而不至于随着计算次数的增加而无限增大,则称差分方程是稳定的.
[迭代法解差分方程] 在五点格式的差分方程中,任意取一组初值{uij},只要求它们在边界节点(i,j)上取以已知值(xi*,yj*),然后用逐次逼近法(也称迭代法)解五点格式:
![]()
逐次求出{uij(n)}.当(i+1,j),(i-1,j),(i,j-1),(i,j+1)中有一点是边界节点时,每次迭代时,都要在这一点上取最接近的边界点的值.当n∞时,uij(n)收敛于差分方程的解,因此n充分大时,{uij(n)}可作差分方程的近似解,迭代次数越多,近似解越接近差分方程的解.
[用调节余数法求节点上解的近似值] 以差商代替Δu时,用节点(i+1,j),(i-1,j),(i,j+1),(i,j-1)上u的近似值来表示u在节点(i,j)的值将产生的误差,称此误差为余数Rij,即
![]()
|
图14.8 |
设在(i,j)上给uij以改变量uij,从上式可见Rij将减少4uij,而其余含有u(xi,yj)的差分方程中的余数将增加uij,多次调整uij的值就可将余数调整到许可的有效数字的范围内,这样可获得各节点上u(x,y)的近似值.这种方法比较简单,特别在对称区域中计算更简捷.
例
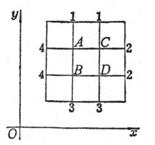
求Δu=0在内节点A,B,C,D上解的近似值.设在边界节点1,2,3,4上分别取值为1,2,3,4(图14.8)
解
记u(A)=uA,点A,B,C,D的余数分别为
-4uA+
uB+ uc +5=RA
uA-4 uB
+ uD+7=RB
uA
-4 uc+ uD+3=RC
uB+ uc-4uD+5=RD
以边界节点的边值的算术平均值作为初次近似值,即
uA(0)=uB(0)=uC(0)=uD(0)=2.5
则相应的余数为:
RA=0, RB=2, RC= -2,
RD=0
最大余数为±2.先用δuC=-0.5把RC缩减为零,uC相应地变为2,这时RA, RD也同时缩减(-0.5),新余数是RA=-0.5,RB=2,![]() , RD=-0.5.类似地再变更δuB=0.5,从而 uB变为3,则得新余数为
, RD=-0.5.类似地再变更δuB=0.5,从而 uB变为3,则得新余数为![]() .这样便可消去各节点的余数,于是u在各节点的近似值为:
.这样便可消去各节点的余数,于是u在各节点的近似值为:
uA=2.5, uB=3, uC=2, uD=2.5
现将各次近似值及余数列表如下:
|
次数 |
调 整 值 |
第n次近似值及余数 |
|||||||
|
uA |
RA |
uB |
RB |
uC |
RC |
uD |
RD |
||
|
0 1 2 |
δuC = -0.5 δuB = 0.5 |
2.5 2.5 2.5 |
0 -0.5 0 |
2.5 2.5 3 |
2
2 0 |
2.5 2 2 |
-2 0 0 |
2.5 2.5 2.5 |
0 -0.5 0 |
|
结果近似值 |
2.5 |
|
3 |
|
2 |
|
2.5 |
|
|
[解重调和方程的差分方法] 在矩形D(x0≤x≤x0+a,y0≤y≤y0+a)中考虑重调和方程
![]()
取步长![]() ,引直线族
,引直线族
 (i, j = 0, 1, 2
(i, j = 0, 1, 2![]() n)
n)
作成一个正方形网格.用差商代替偏导数
|
图14.9 |
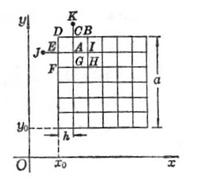
上式表明了以(x,y)为中心时,u(x,y)的函数值与周围各点函数值的关系,但对于邻近边界节点的点(x,y),如图14.9中的A,就不能直接使用上式,此时将划分网格的直线族延伸,在延伸线上定出与边界距离为h的点,称这些点为外邻边界节点,如图14.9以A为中心时,点E,C为边界节点,点J,K为E,C的外邻边界节点,用下法补充定义外邻边界节点J处函数的近似值uJ,便可应用上面的公式.
1° 边界条件为
![]()
时,定义uJ=uA-22(E)h.
2° 边界条件为
时,定义uJ=21(E)-uA-h22(E).
[其他与Δu有关的网格]
1° 三角网格(图14.10(a))
取P0(x,y)为中心,它的周围6个邻近节点分别为:
则 ![]()
式中ui=u(Pi),
u0=u(P0),R表示余项.
2° 六角网格(图14.10(b))
取P0(x,y)为中心,它的三个邻近节点分别为
则
![]() .
.
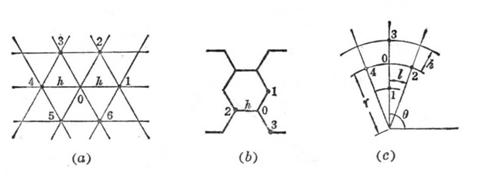
图14.10
3° 极坐标系中的网格(图14.10(c))
取P0(r,![]() )为中心,它的四个邻近节点分别为
)为中心,它的四个邻近节点分别为
![]()
而拉普拉斯方程
![]()
的相应的差分方程为
![]()
3. 抛物型方程的差分方法
考虑热传导方程的边值问题
将[0,b]分为n等份,每段长为![]() .引两族平行线(图14.11)
.引两族平行线(图14.11)
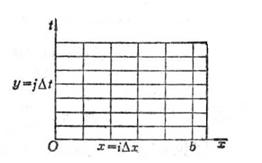
图14.11
x=xi=ix (i=0,1,2![]() n)
n)
y=yj=jt (j=0,1,2![]() t 取值见后)
t 取值见后)
作成一个长方形的网格,记u(xi,tj)为uij,节点(xi,tj)为(i,j),在节点(i,j)上分别用
![]()
代替![]() ,于是边值问题化为差分方程
,于是边值问题化为差分方程
记![]() ,差分方程可写成
,差分方程可写成
![]() (1)
(1)
由此可按t增加的方向逐排求解.在第0排上ui0的值由初值(ix)确定,j+1排ui,j+1的值可由第j排的三点(i+1,j),(i,j),(i-1,j)上的值ui+1,j, uij,ui-1,j确定,而u0,j+1,un,j+1已由边界条件1((j+1)t)及2((j+1)t)给定,于是可逐排计算一切节点上的uij值.当(x), 1(x)和2(x)充分光滑,且![]() 时,差分方程收敛而且稳定.所以利用差分方程(1)计算时,必须使
时,差分方程收敛而且稳定.所以利用差分方程(1)计算时,必须使![]() ,即
,即![]() .
.
热传导方程还可用差分方程

代替,此时如已知前j排uij的值,为求第j+1排的ui,j+1
必须解包含n-1个未知量![]() 的线性代数方程组,这种差分方程称为隐式格式的差分方程,前面所提的差分方程称为显式格式差分方程.
的线性代数方程组,这种差分方程称为隐式格式的差分方程,前面所提的差分方程称为显式格式差分方程.
隐式格式差分方程对任意的λ都是稳定的.
4. 双曲型方程的差分方法
考虑弦振动方程的第一边值问题
用矩形网格,列出对应的差分方程:
记![]() 与上段一样,利用
与上段一样,利用![]() 和在第0排及第1排的已知数值(初始条件)ui0 ,
ui1可计算ui2,然后用已知的ui1 ,
ui2及
和在第0排及第1排的已知数值(初始条件)ui0 ,
ui1可计算ui2,然后用已知的ui1 ,
ui2及![]() 可计算ui3,类似地可确定一切节点上的uij值.
可计算ui3,类似地可确定一切节点上的uij值.
当(x),(x),1(x)和2(x)充分光滑,且ω≤1时,差分方程收敛且稳定,所以要取![]() .
.
二、 变分方法
1. 自共轭边值问题
将§3定义的共轭微分算子的概念推广到一般方程.
设D是![]() 中的有界区域,S为其边界,在
中的有界区域,S为其边界,在![]() 上考虑2k阶线性微分方程
上考虑2k阶线性微分方程

的齐次边值问题
![]()
式中f(x)是D内的已知函数,lju是线性微分算子.
将 ![]() 分部积分k次得
分部积分k次得
式中(u,v)是一个D上的积分,其被积函数包含u,v的k阶导数;Rj和![]() 是定义在边界S上的两个线性微分算子.再将(u,v)分部积分k次得
是定义在边界S上的两个线性微分算子.再将(u,v)分部积分k次得

式中L*是一个2k阶的微分算子,称为L的共轭微分算子.若L=L*,则称L为自共轭微分算子.从上面可推出格林公式
![]()
如从lju|S=ljv|S=0可推出在边界S上
![]()
则称lju|S=0为自共轭边界条件.如果微分算子及边界条件都是自共轭的,则称相应的边值问题为自共轭边值问题,此时有
![]()
每个边值问题对应于某希尔伯特空间H(例如L2(D),见第九章§7)中的一个算子A,其定义域MA 是H中一线性稠密集合,它由足够次连续可微且满足边界条件的函数组成,在MA上,Au的数值与Lu的数值相同,从而求解边值问题化为解算子方程
![]()
的问题.
设A为定义在实的希尔伯特空间H中的某线性稠密集合MA上的线性算子.若对于MA的任意非零元素![]() 成立
成立
(Au,v)=(u,Av)
则称A为对称算子.若对任意非零元素u成立
![]()
则称A为正算子.如成立更强的不等式
(Au,u)≥r||u||2 (r>0)
则称A为正定算子.此处(u,v)表示希尔伯特空间的内积,||u||2=(u,u).
2. 变分原理与广义解
定理
设A是正定算子,u是方程Au=f在MA上的解的充分必要条件是: u使泛函
F(u)=(Au,u)-2(f,u)
取极小值.
上述将边值问题化为等价的求泛函极值问题的方法称为能量法.在算子的定义域不够大时,泛函F(u)的极值问题可能无解.不过对于正定算子,可以开拓集合MA,使在开拓了的集合上,泛函的极值问题有解.为开拓MA,在MA上引进新的内积[u,v]=(Au,v),定义模||u||2=[u,u]=(Au,u),在模||u||的意义下,补充极限元素,得到一个新的完备希尔伯特空间H0,在H0上,泛函F(u)仍然有意义,而泛函的极值问题有解.但必须注意,此时使泛函F(u)取极小的元素u0不一定属于MA,因此它不一定在原来的意义下满足方程Au=f及边界条件.称u0为广义解.
3. 极小化序列与里兹方法
在处理变分问题中,极小化序列起着重要的作用.考虑泛函
F(u)=(Au,u)-2(f,u)
以d表示泛函的极小值.设在希尔伯特空间中存在一列元素{un}
(n=1,2![]() ),使
),使
![]()
则称{un}为极小化序列.
定理
若算子A是正定的,则F(u)的每一个极小化序列既按H空间的模也按H0的模收敛于使泛函F(u)取极小的元素.
这个定理不但指出利用极小化序列可求问题的解,而且提供一种近似解的求法,即把极小化序列中的每一个元素当作问题的近似解.
设算子A是正定的,构造极小化序列的里兹方法的主要步骤是:
(1) 在线性集合MA中选取H0中完备的元素序列{i} ,
(i=1,2![]() ) 并要求对任意的n,1,2,…,n线性无关.称这样的元素为坐标元素.
) 并要求对任意的n,1,2,…,n线性无关.称这样的元素为坐标元素.
(2) 令![]() ,其中ak为待定系数.代入泛函F(u),得自变量a1,a2,…,an的函数
,其中ak为待定系数.代入泛函F(u),得自变量a1,a2,…,an的函数
![]()
(3) 为使函数F(un)取极小,必须![]() ,从而求出ak (k=1,2,…,n).序列{un}即为极小化序列,un可作为问题的近似解.
,从而求出ak (k=1,2,…,n).序列{un}即为极小化序列,un可作为问题的近似解.
4. 里兹方法在特征值问题上的应用
算子方程
Au-u=0
的非零解称为算子A的特征值,对应的非零解u称为所对应的特征函数.
对线性算子A,若存在常数K,使对任何MA的元素成立
(A,)≥K||||2
则称A为下有界算子,正定算子是下有界的(此时K=0).记(A,)/||||2的下确界为d.
定理1 设A为下有界对称算子,若存在不为零的元素0MA,使

则d就是A的最小特征值,0为对应的特征函数.
于是求下有界对称算子的最小特征值问题化为变分问题,即在希尔伯特空间中求使泛函(A,)/||||2取极小的元素,或在||||=1的条件下求使泛函(A,)取极小的元素.
定理2 设A是下有界对称算子,1≤2≤…≤n是它的前n个特征值,1,2,…,n是对应的标准正交特征函数,如果存在不为零的元素![]() ,在附加条件
,在附加条件
(,)=1, (,1)=0, (,2)=0, …, (,n)=0
下使泛函(A,)取极小,则n+1是算子A的特征函数,对应的特征值
![]()
就是除1 ![]() ,n外的最小的一个特征值.
,n外的最小的一个特征值.
于是求第n+1个特征值就化为变分问题,即在附加条件
(,)=1, (,1)=0, (,2)=0![]() , (,n)=0
, (,n)=0
下求使泛函(A,)取极小的元素.
为了利用里兹方法求特征值,在MA中选取一列在H0中完备的坐标元素序列{i},
(i=1,2![]() ), 令
), 令![]() ,确定ak,使在条件 (un,un)=1下,(Aun,un)取极小,这个问题化为求n个变元a1,a2,…,an的函数
,确定ak,使在条件 (un,un)=1下,(Aun,un)取极小,这个问题化为求n个变元a1,a2,…,an的函数
![]()
在条件
![]()
下的极值问题,一般可用拉格朗日乘数法解(见第九章§3,t),此时

的最小的根即为特征值的近似值,如果将上式的根按大小排列,就依次得后面的特征值的近似值,但精确度较差.
对一般算子方程
Au-Bu=0
如果A为下有界对称算子,B为正定算子,则
的根就是特征值的近似值.
5. 迦辽金方法
用里兹方法解数学物理问题有很多限制,最主要的限制是要求算子正定,但很多问题不一定满足这个条件,迦辽金方法弥补了这个缺陷.
迦辽金方法的主要步骤是:
(1) 在MA中选取在空间H中完备的元素序列{i} (i=1,2![]() ),其中任意n个元素线性无关,称{i} (i=1,2,…)为坐标元素序列.
),其中任意n个元素线性无关,称{i} (i=1,2,…)为坐标元素序列.
(2) 把方程的近似解表示为
![]()
式中ak是待定常数,把un代入方程Au=f中的u,两端与j
(j=1,2,…,n)求内积,得 ak的n个代数方程
![]()
(3) 求出ak,代回un的表达式,便得方程的近似解un.
在自共轭边值问题中,当算子是正定时,由迦辽金方法和里兹方法得到的关于ak的代数方程组是相同的.